Estructura del Brazo Robótico
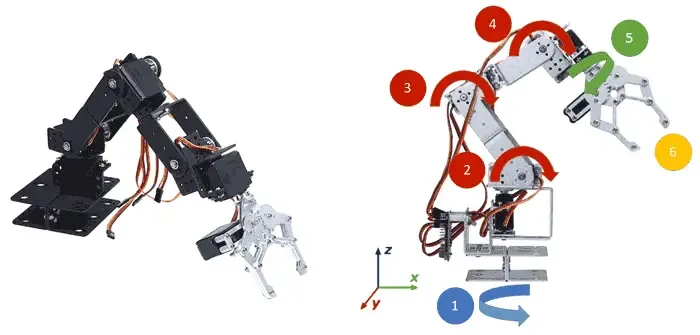
La estructura del brazo robótico está compuesta por varios segmentos unidos mediante servomotores, permitiendo movimientos precisos en múltiples direcciones.
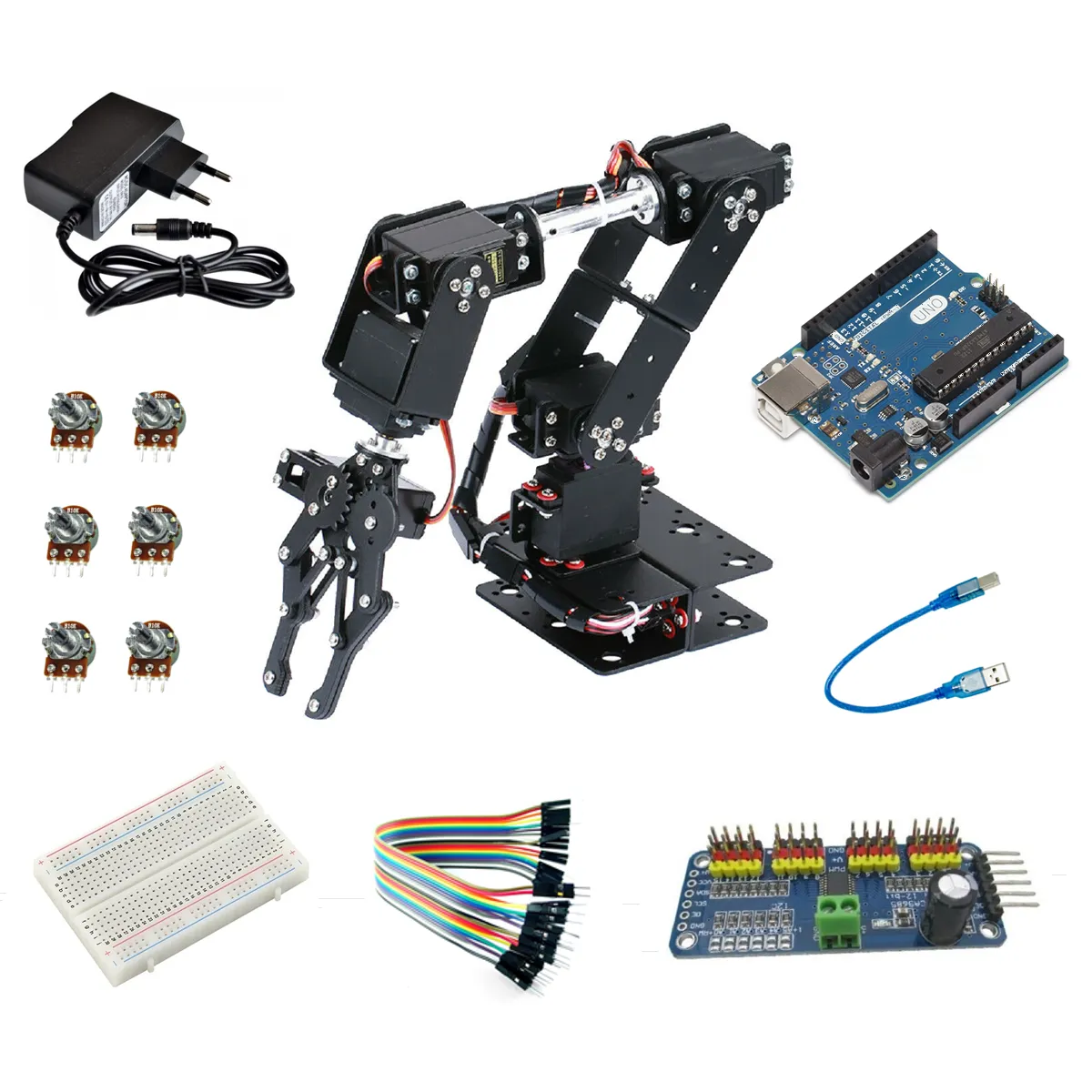
🔹 Componentes Principales
-
Base 🏗️
- Sujeta el brazo y permite su rotación.
- Controlado por un servo base.
-
Eslabones 🔩
- Conectan las articulaciones del brazo.
- Cada eslabón está controlado por un servo.
-
Pinza o Efector Final 🤖✋
- Se usa para sujetar objetos.
- Controlado por un servo de agarre.
-
Controlador de Servos (PCA9685) ⚙️
- Permite controlar hasta 16 servos con solo dos pines I2C.
- Se comunica con Arduino mediante la librería
Adafruit_PWMServoDriver.
🔹 Conexión del Controlador de Servos
| Controlador PCA9685 | Arduino |
|---|---|
| VCC | 5V |
| GND | GND |
| SDA | A4 |
| SCL | A5 |
Los servomotores se conectan a los pines PWM del controlador.
🔹 Código para Controlar el Brazo
Este código usa la librería de Adafruit para manejar el controlador de servos.
#include <Wire.h>#include <Adafruit_PWMServoDriver.h>
#define MIN_PULSE 150 // Pulso mínimo del servo#define MAX_PULSE 600 // Pulso máximo del servo
Adafruit_PWMServoDriver servos = Adafruit_PWMServoDriver(0x40);
void setup() { Serial.begin(9600); servos.begin(); servos.setPWMFreq(50); // Frecuencia de 50Hz para servos}
void moverServo(int numServo, int angulo) { int pulso = map(angulo, 0, 180, MIN_PULSE, MAX_PULSE); servos.setPWM(numServo, 0, pulso);}
void loop() { moverServo(0, 90); // Base a 90 grados moverServo(1, 45); // Hombro a 45 grados moverServo(2, 90); // Codo a 90 grados moverServo(3, 45); // Muñeca rotación moverServo(4, 90); // Muñeca inclinación moverServo(5, 20); // Pinza abierta delay(1000);
moverServo(0, 180); moverServo(1, 90); moverServo(2, 45); moverServo(3, 90); moverServo(4, 45); moverServo(5, 70); // Pinza cerrada delay(1000);}